基本原理
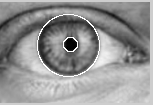
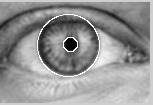
如下图,人眼形状是圆形。在图像中找到一个圆,该圆应该有明显的边界(虹膜与眼白)。在该圆周上的各像素平均值与相邻半径的平均值之差达到最大。如下图的外圆。假设其圆心为c, 半径为r。那么半径r+1圆周上的像素平均值与r的像素平均值达到最大。
基本思路是:先遍历圆心位置,再遍历半径,找到相差最大的位置。为了加速,可以用各种方法去快速定位圆心位置。该文章使用阈值+局部最小+粗搜索来缩小范围。找到了该圆心大致范围,再遍历所有找最小。

预处理
I=imcomplement(imfill(imcomplement(I),'holes'));
粗检测
- I < 0.5
- 排除3x3矩阵内的非局部最小值
- 排除离各个边缘距离小于最小半径的点
- 对于剩下的点,采用partiald在圆弧上求blur积分
- 最大值即为iris的中心所在的大致位置
细检测 search
- 在粗检测附近找10x10的patch
- 在这个patch内,同样采用partiald在圆弧上求blur积分
- 最大值即为iris的中心所在的大致位置,而这个半径也就是iris半径
各算法细节
partiald
R半径20-180遍历,每个求L (通过lineint求取)
若超出图像范围,半径不再增加
对于各个半径获得对应的L,对L差分(diff(L))
对这个差分进行blur, blur=convn(D,f,'same');
取这个blur里面绝对值最大值作为以该点为中心的“置信度”
lineint算法
在围绕(x,y)指定半径r的圆周上, 将像素值累加,再去平均值即为L值。(注意:这里iris和pupil方法略有不同)。圆周的累加采用等分方法,将圆周等分600份,取圆周上的点的像素值进行计算。
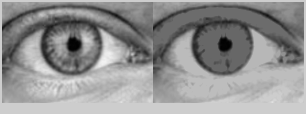
最终结果: