本文探讨使用强化学习的方法,自动玩Pong游戏。
本文主要参考: Deep Reinforcement Learning: Pong from Pixels
Pong游戏如下图所示,两个玩家各控制一个挡板,操作对象是一个小球,在游戏过程中,白球从哪一方穿过,哪一方算失败。
马尔可夫决策过程
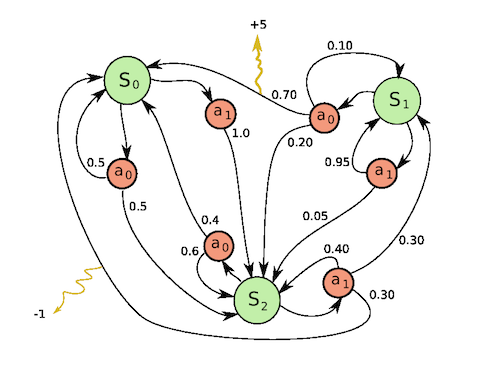
模型中包含环境和agent。agent所处的环境用状态S表示。agent可以针对环境(当前所处的状态)做出action,在action之后,环境的转变体现为状态的转变。在agent的做出action之后,需要对其进行奖励或者惩罚(reward),使其最终能很好地适应环境。
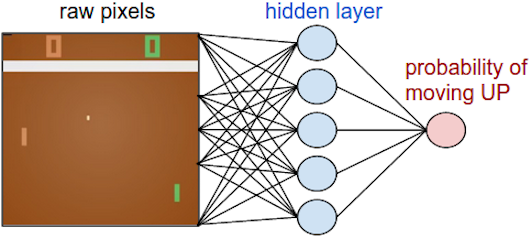
策略网络(policy network)
策略网络就是简单的神经网络。用图片的原始像素值作为输入来确定是向上移动还是向下移动(分类问题)。直觉上来说,通过100,800个数字(210*160*3)来做分类需要大量的数据。本文解决两个问题:
- 在达到最终结果之前,根本不知道前面的步骤应该奖赏还是惩罚。
- 也有可能前面的多帧的决策都没有问题,由于后面某帧的失误,导致最终失败,在这种情况下怎么处理呢?
左边是由openAI提供的gym运行环境和AI,右边是训练模型的表现。
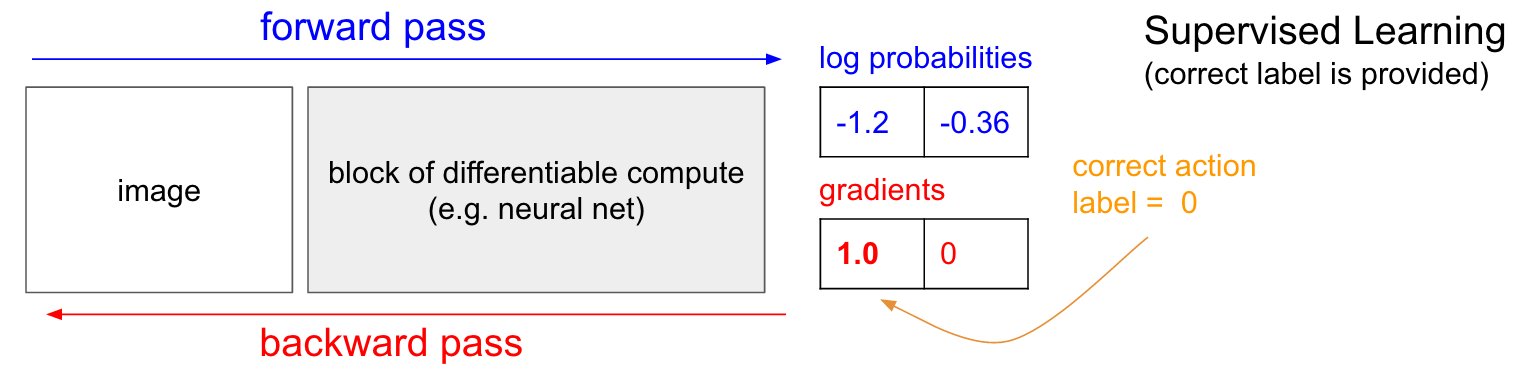
监督学习
在监督学习中,对于每个样本都有一个标签来表示正确的分类结果。先假设在Pong游戏中,我们已经知道每一帧的是应该向下还是向下。我们根据策略网络的预测值,对其做误差方向传播,从而调整模型权重。
策略梯度
上一节讲解了在有标签的情况下,怎么学习策略网络。但是在实际中,我们并没有大量监督数据,解决这个问题的是:策略梯度(Policy Gradients),深度Q学习 (deep Q learning)。 google deepMind在2013年最初利用deep Q learing学习atari游戏,取得超过人类的结果。但是在之后的研究中,人们发现策略梯度的效果更好(其中包括deep Q learing的作者)。AlphaGo使用的是策略梯度+蒙特卡洛树搜索(Monte Carlo Tree Search).
本文的作者所训练的模型是基于策略梯度。下文主要讲解策略梯度。
再来考虑上文提出的两个问题.
-
问题1中,在游戏决定胜负的时候,可以定义胜利的奖赏是+1,失败的惩罚为-1. 对于中间大量的帧应该使用什么奖赏呢。答案是,在游戏决定胜负之后,根据最终的结果决定对前面的action进行惩罚还是奖励。
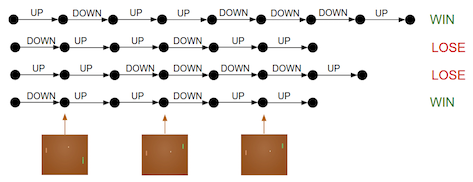
-
问题2:如何处理前面很好,后面由于失误导致的失败呢?答案是: 在不断重复的游戏过程中,前面正确的决策更可能使得最终取得胜利,所以,平均来说,正确决策的所获得的正向更新会高于获得的负向更新。这样,我们的策略最终还是会做出正确的选择。
到目前为止,我们只分胜负,对于胜利+1,对于失败-1。实际上,一般来说,更靠近最终结束的action所造成的影响越大。前面的影响相对较小。应该对此加以区分。用\(r_t\)来标记\(t\)帧所应该获得奖赏。在原来的做法中,\(r_t\)只有获得胜负时候才有,其他的都取为0. 一个做法是:\( R_t = \sum_{k=0}^{\infty} \gamma^t r_{t+1} \). 称为”\(gama\)折扣累积奖赏”。
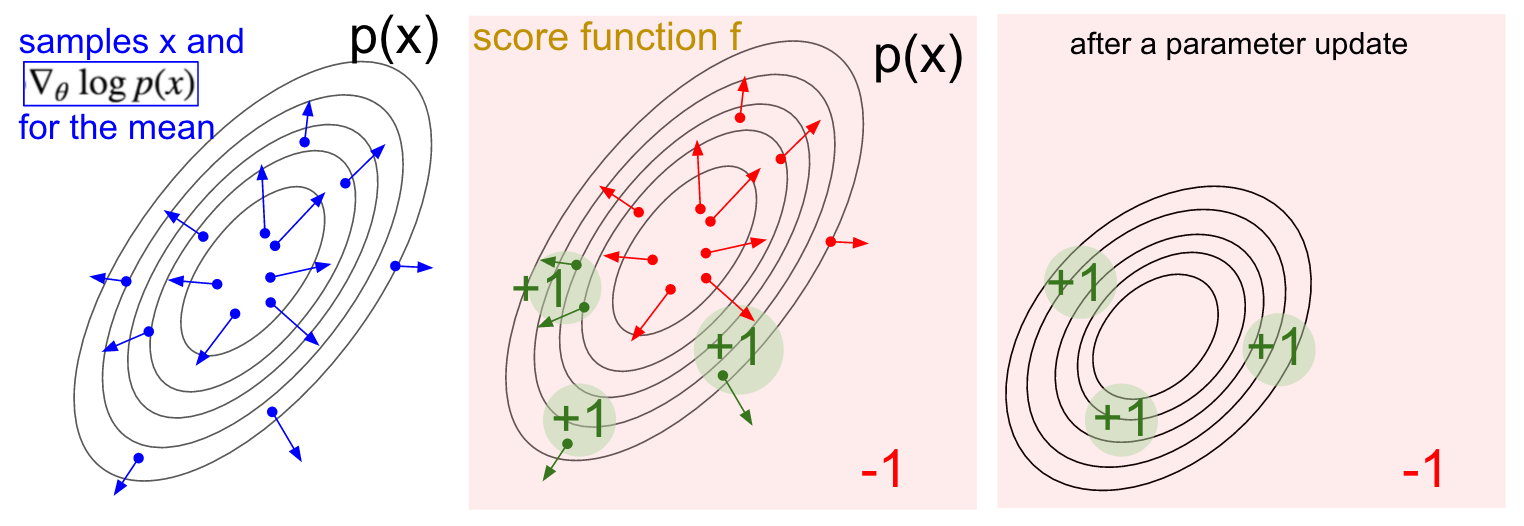
策略梯度推导
\[\begin{align} \nabla_{\theta} E_x[f(x)] &= \nabla_{\theta} \sum_x p(x) f(x) & \text{definition of expectation} \\ & = \sum_x \nabla_{\theta} p(x) f(x) & \text{swap sum and gradient} \\ & = \sum_x p(x) \frac{\nabla_{\theta} p(x)}{p(x)} f(x) & \text{both multiply and divide by } p(x) \\ & = \sum_x p(x) \nabla_{\theta} \log p(x) f(x) & \text{use the fact that } \nabla_{\theta} \log(z) = \frac{1}{z} \nabla_{\theta} z \\ & = E_x[f(x) \nabla_{\theta} \log p(x) ] & \text{definition of expectation} \end{align}\]